BOSM -4Z2000 Kiʻekiʻe kiʻekiʻe CNC wili a me ka mīkini wili
1.Equipment hoʻohana:
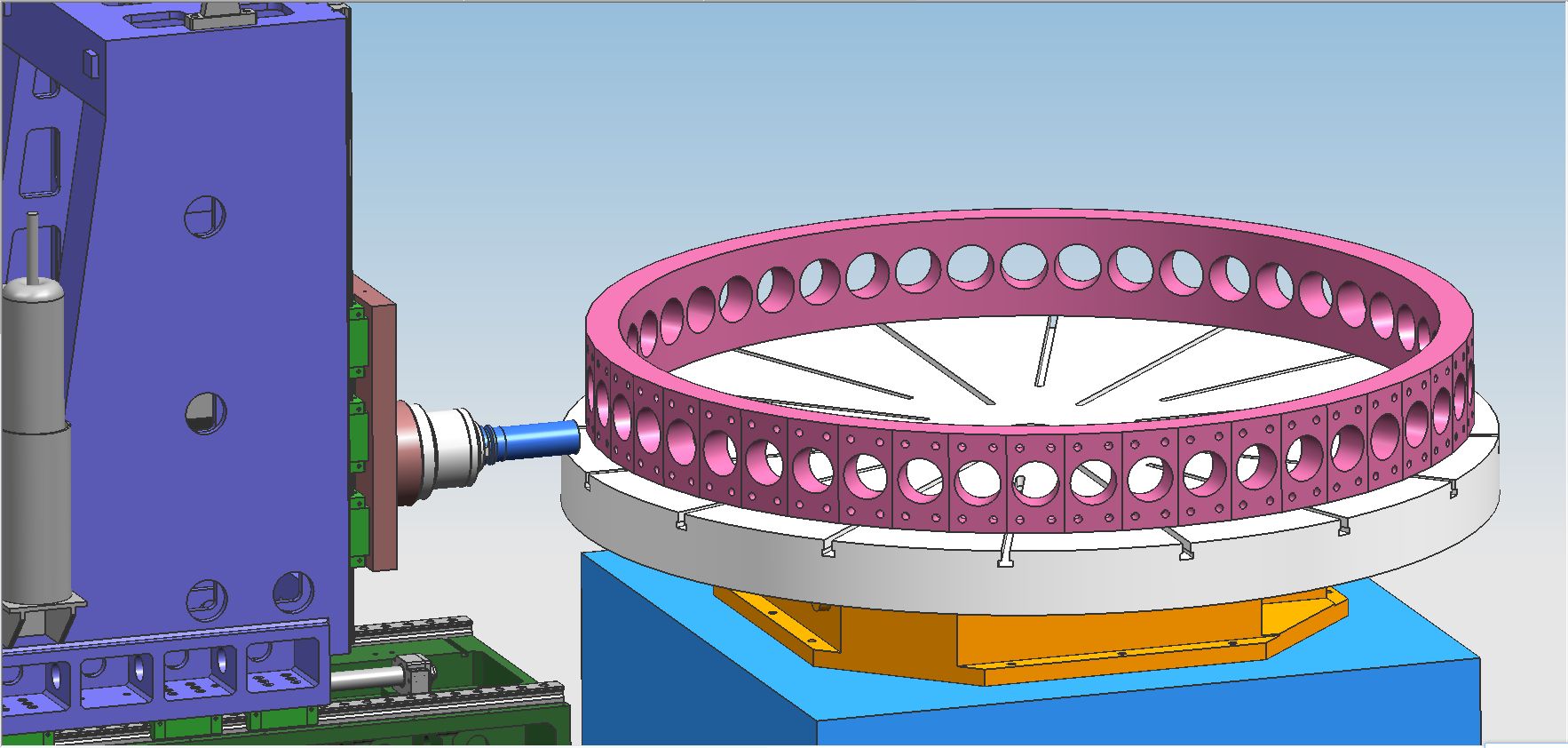
Hoʻohana nui ʻia ʻo BOSM-1000 horizontal CNC drilling a me ka mīkini wili no ka hoʻoheheʻe ʻana i nā ʻano he nui, ka wili ʻana, ka paʻi ʻana a me ka hana ʻino ʻana o nā valves, block blocks, reducers, flanges, discs, rings, slewing supports and other workpieces in the effective range of thickness. . Hiki ke ʻike ʻia ka ʻeli ʻana, ka wili ʻana, ka paʻi ʻana a me ka hoʻoluhi ʻana ma nā ʻāpana mea hoʻokahi a me nā mea hoʻohui. ʻO ke kaʻina hana machining o ka Mīkini i hoʻopaʻa ʻia, a ua maʻalahi ka hana. Hiki iā ia ke hoʻomaopopo i ka automation, precision kiʻekiʻe, multi-variety a me ka hana nui.
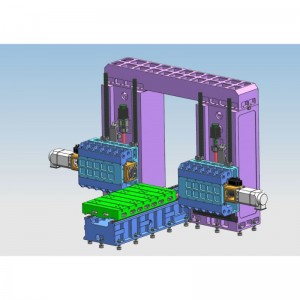
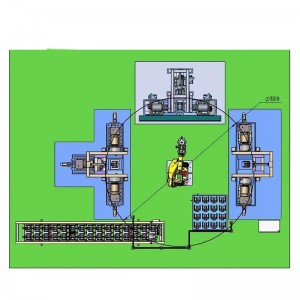
2. Hoʻolālā lako:
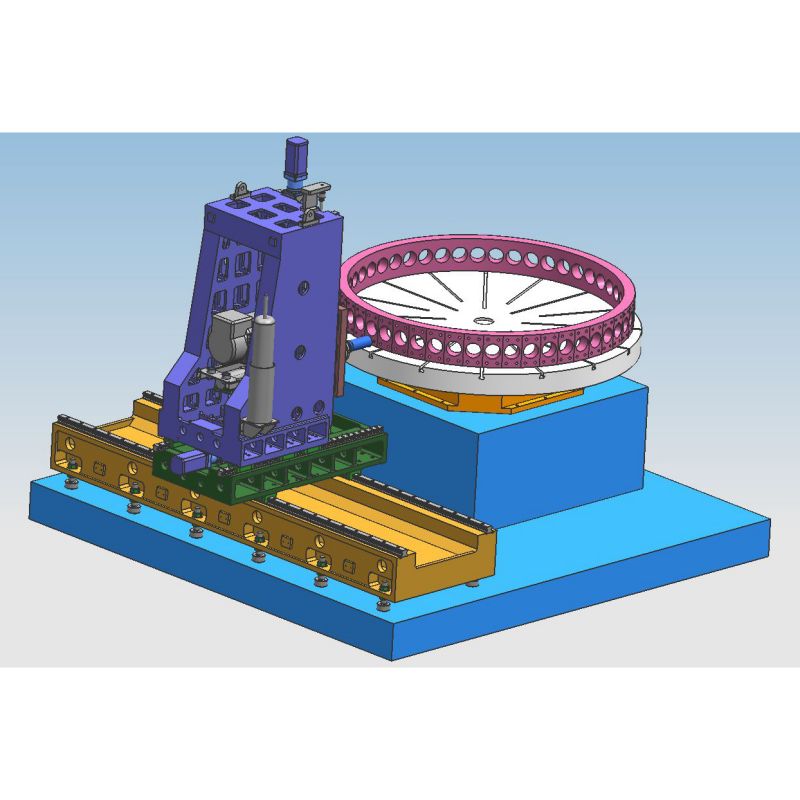
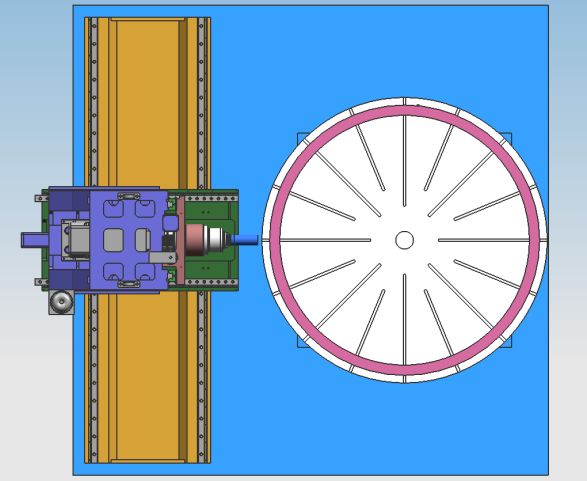
ʻO kēia mau mea hana ka mea nui i ka moena, CNC indexing rotary table, movable column, movable saddle, drilling and milling power head, lubrication mīkini a me ka mea pale, circulating cooling device, digital control system, hydraulic system, electrical system and so on. Kākoʻo ʻia a alakaʻi ʻia ke kaʻa alakaʻi laina ʻōwili ʻia, a hoʻokele ʻia ka wili pololei. He kūlana kūlana kiʻekiʻe ka Mīkini a hoʻihoʻi hou i ka pololei kūlana.
2.1. ʻO ka papa hana moe: Hana ʻia ka moena me nā ʻāpana hana hao hao HT250. Hoʻopau ʻia ma hope o ka hoʻoheheʻe ʻana i ka lua no ka wehe ʻana i ke kaumaha o loko. Loaʻa iā ia ka ikaika ikaika a me ka static rigidity a ʻaʻohe deformation. ʻO ka papa kuhikuhi helu helu pololei, ka servo drive 360 ° arbitrary indexing positioning a me ka ea/hydraulic locking, ke hoʻohana nei ka ʻōnaehana hoʻokele AC servo motor e kuhikuhi maʻalahi i ka ʻāpana wili 360 °, a ʻo ka pololei helu kuhikuhi he hoʻokahi kaukani o ke degere. Hoʻonoho ʻia ka papa kuhikuhi ma luna o ka moena, a ua māhele ʻia nā bolts hiki ke hoʻololi ʻia ma lalo o ka moena, hiki ke maʻalahi i ka pae o ka papa hana moe.
2.2. Koluma hoʻoneʻe: Ua pau ke kolamu hoʻoneʻe ʻia ma hope o ka hoʻomaʻamaʻa ʻana i ka lua no ka wehe ʻana i ke kaumaha o loko. Loaʻa iā ia ka ikaika ikaika a me ka static rigidity a ʻaʻohe deformation. ʻO kahi pūʻulu o nā hui pōpō pōkā pololei a me kahi kaʻa servo e hoʻoneʻe i ke kolamu paheʻe ma ke kuhikuhi Y-axis. ʻO kahi pūʻulu o nā hui pōpō pōleʻa pololei a me kahi kaʻa servo e hoʻoneʻe i ke kolamu paheʻe ma ke kuhikuhi X-axis. E hoʻouka i kahi ʻāpana wili ma ka paheʻe ʻāpana. Hoʻomaopopo ʻia ka neʻe ʻana o ke kolamu e ka hoʻololi ʻana o ka nati kinipōpō ma ka pōleʻa pōleʻa i alakaʻi ʻia e ka motor servo ma o ka hui ʻana.
2.3. Saddle Mobile: Hoʻolako ʻia ka noho paʻa me ʻelua mau mea hoʻokele kiʻekiʻe kiʻekiʻe e holo ana i ka laina alakaʻi alakaʻi laina, kahi pūʻulu o ka pōlele pōlele pololei a me kahi kaʻa servo, ka mea e hoʻoneʻe i ke poʻo wili e neʻe i ka kuhikuhi Z-axis, hiki ke hiki. ʻike i ke poʻo mana wikiwiki i mua, hana i mua, hoʻohuli wikiwiki, kū a me nā hana ʻē aʻe. Loaʻa iā ia nā hana o ka haki ʻana i ka chip, wehe a hoʻomaha.
2.4. ʻO ke poʻo mana hoʻoheheʻe: Hoʻohana ke poʻo mana wili i Taiwan mechanical spindle, a ʻo ka spindle kikoʻī kūikawā e hoʻohana i ka bear contact angular, ka mea e ʻike ai i ka loli wikiwiki ʻole ma o ka hoʻouna ʻana i ke kāʻei synchronous kiʻekiʻe. E alakaʻi ʻia e nā ʻenekini servo a me nā ʻūlū pōpō. Hiki ke hoʻopili ʻia ka Y-axis, hoʻohana i ka mana semi-closed-loop control, a hiki ke hoʻomaopopo i ka hana linear a me ka circular interpolation. ʻO ka hope o ka spindle he puka taper BT50.
2.5. ʻO ka mīkini lubrication a me ka mea pale:
Hoʻolako ʻia kēia Mīkini me kahi mea lubrication maʻalahi, hiki ke hoʻomaʻamaʻa maʻalahi i nā hui neʻe e like me ke alakaʻi alakaʻi, alakaʻi wili, a me nā pā. Mīkini
Hoʻolako ʻia ka Z-axis a me Y-axis me nā uhi pale pale lepo, a ua hoʻokomo ʻia nā baffles splash wai a puni ka papa hana.
2.6. Pūnaehana mana helu kikohoʻe piha:
2.6.1. Me ka hana wāwahi chip, hiki ke hoʻonohonoho ʻia ka manawa wāwahi chip a me ka pōʻai wāwahi chip ma ka interface man-machine.
2.6.2. Hoʻolako ʻia me ka hana hāpai hāmeʻa, hiki ke hoʻonohonoho ʻia ke kiʻekiʻe hoʻokiʻekiʻe mea hana ma ke kikowaena kanaka-mīkini. Ke hiki i ka wili ʻana i kēia kiʻekiʻe, e hoʻokiʻekiʻe koke ʻia ka drill bit i luna o ka mea hana, a laila hoʻolei ʻia nā ʻāpana, a laila hoʻouna wikiwiki ʻia i ka ʻili wili a hoʻololi ʻokoʻa i ka hana.
2.6.3. ʻO ka pahu hoʻomalu hana kikowaena a me ka ʻāpana paʻa lima e hoʻohana i ka ʻōnaehana helu helu a ua hoʻolako ʻia me ka USB interface a me ka LCD liquid crystal display screen. I mea e maʻalahi ai ka hoʻonohonoho ʻana, mālama, hōʻike a me ke kamaʻilio ʻana, loaʻa nā hana e like me ke kamaʻilio kanaka-machine, ka uku hewa, a me ke ala ala.
2.6.4. Loaʻa i nā mea hana ke nānā a nānā hou i ke kūlana o ka lua ma mua o ka hana ʻana, a maʻalahi ka hana.
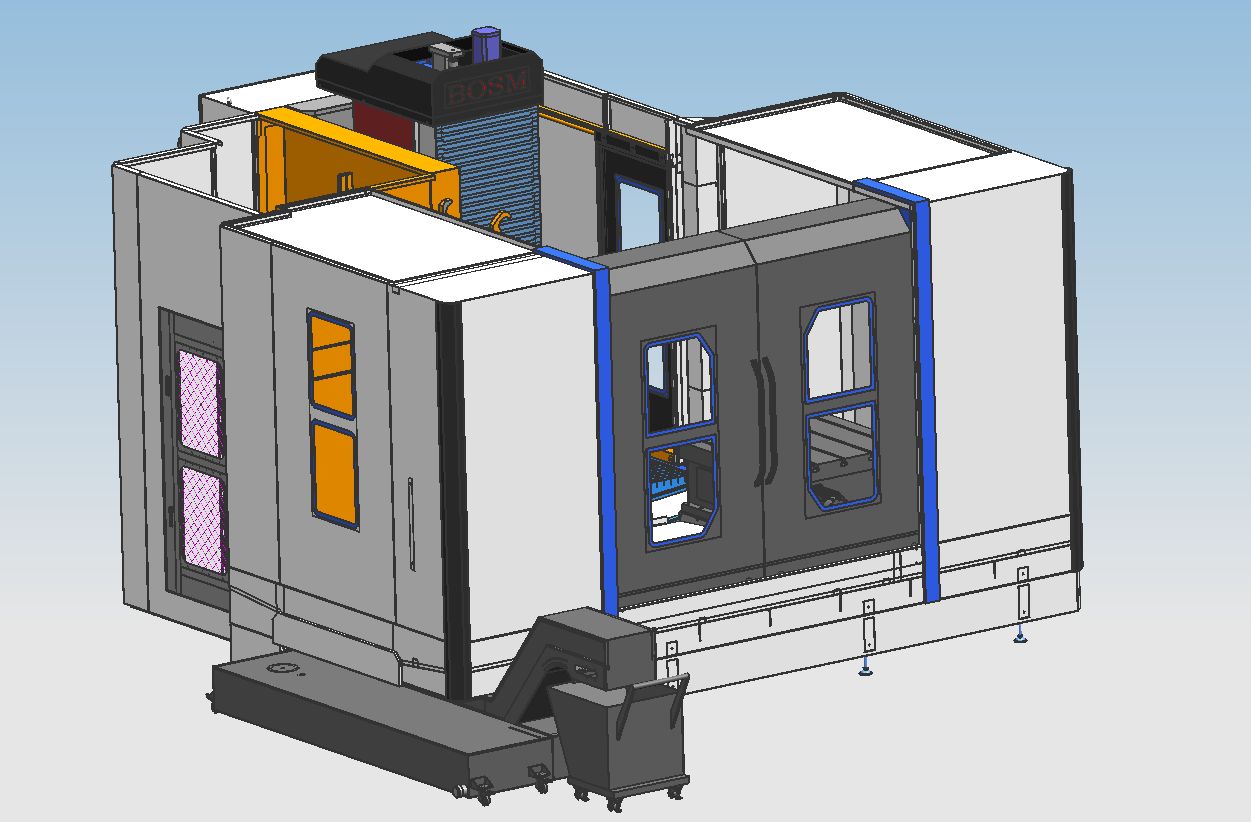
* I mea e hōʻoiaʻiʻo ai i ka ʻoluʻolu o ka hāpai ʻana a me ka hānai ʻana i nā apo nui, ʻaʻohe pale o waho o ka Mīkini, a ʻo ka pale o waho ke koho.
3. Mīkinihoʻohana kaiapuni:
Hāʻawi mana: ʻEkolu-ʻaoʻao AC380V±10%, 50Hz±1 Ambient wela: 0°~ 45°
4.Nā palena ʻenehana
| Hoʻohālike | BOSM-1000 | |
| ʻO ka hana kiʻekiʻe ka nui o ka mea hana | ʻAe ʻia ke anawaena hoʻololi kiʻekiʻe loa o ka mea hana (mm) | ≤Φ2000 |
|
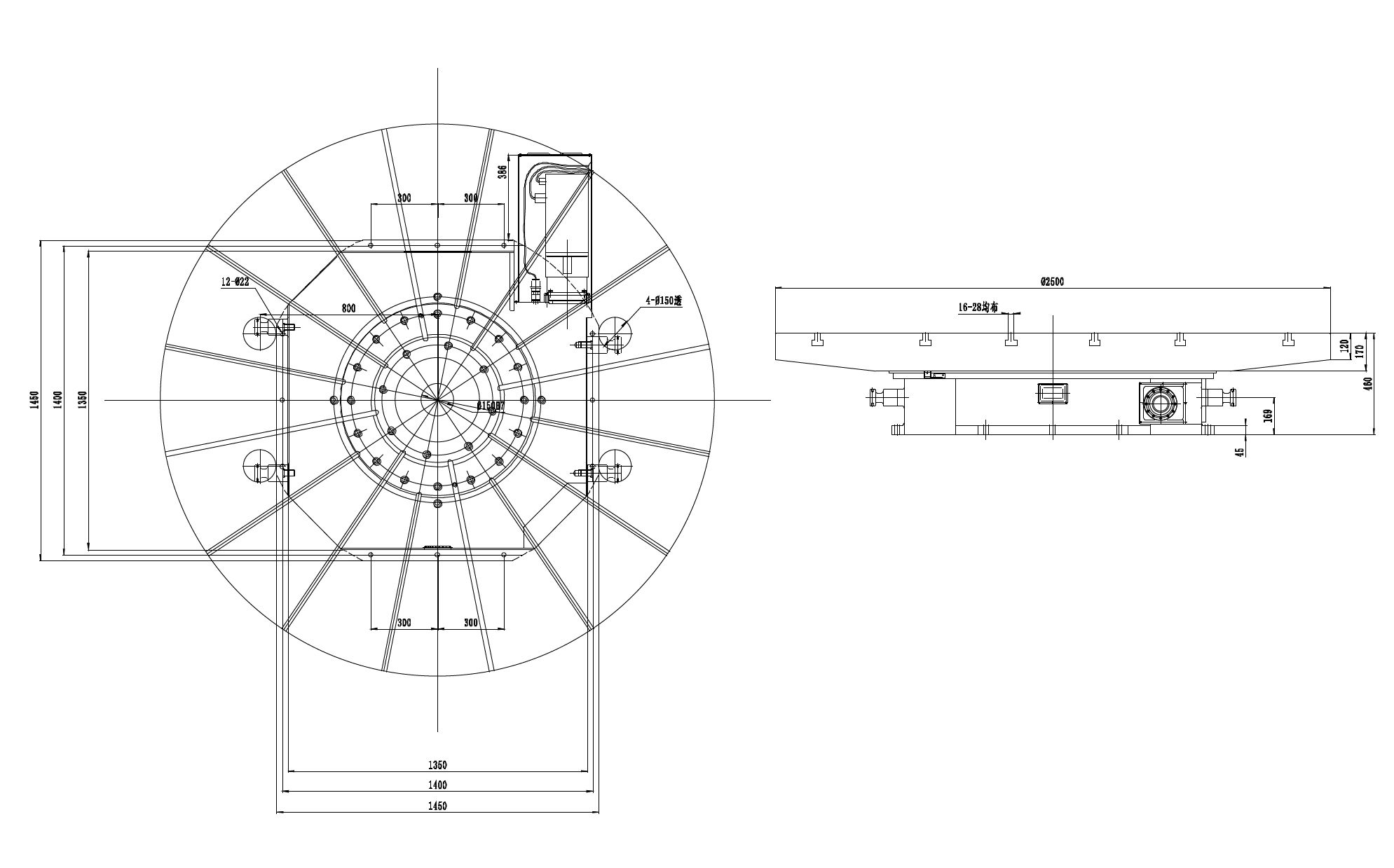
Papa hana | Nā ana o ka pākaukau hana (mm) huinahā | □1000 |
| Nā ana o ka papa hana (mm) poepoe | Φ1200 | |
| ʻO ka haʻawe kiʻekiʻe loa (kg) | 5000 | |
|
Kekahi wili Ram Vertical | nui) | 1 |
| Spindle lipi | BT50 | |
| Anawaena wili (mm) | 2-120 | |
| ʻO ke anawaena o ka mea ʻoki wili palaoa (mm) | 200 | |
| Anawaena paʻi (mm) | M6-M36 | |
| Ka mamao mai ke alo hope o ka spindle a i ke kikowaena papaʻaina (mm) | 1000-1600 | |
| Ka mamao mai ke kikowaena spindle a i ka mokulele luna o ka pākaukau (mm) | 100-1100 | |
| ʻO ka māmā milo (r/min) | 30-3000 | |
| Ka mana kaʻa milo (kw) | 30 | |
| Mea hana axis rotation (A axis) | Helu mahele nui (mm) | 360° |
| E hoʻonoho i ka ʻāpana mahele liʻiliʻi | 0.001° | |
| A-axis servo motor mana (kw) | 4.2 | |
| Holo ka poʻo mana i ka hema a me ka ʻākau (X axis) | ʻO ka hahau kiʻekiʻe loa (mm) | 2000 |
| X-axis neʻe ka māmā holo (m/min) | 0~8 | |
| X-axis servo motor mana (kw) | 2.4 | |
| Ke neʻe nei ke poʻo mana i luna a i lalo (axis Y) | ʻO ka hahau kiʻekiʻe loa (mm) | 1000 |
| ʻO ka neʻe ʻana o ka māmā axis Y (m/min) | 0~8 | |
| ʻO ka mana kaʻa servo Y-axis (kw) | 2.4 Paʻa | |
| Ka neʻe ʻana o ke kolamu longitudinal (Z axis) | ʻO ka hahau kiʻekiʻe loa (mm) | 600 |
| ʻO ka māmā neʻe ʻana o Z-axis (m/min) | 0~4 | |
| Z axis servo motor mana (kw) | 2.4 | |
| Ka pololei o ka hoonoho ana | 1000mm | ±0.05 |
| Hiki hou | 1000mm | ±0.025 |
| ʻO ka pololei helu kuhikuhi papa kuhikuhi CNC (mm) |
| 15” |
| Nā ana mīkini (me ka palekana) | Ka lōʻihi (X) × laula (Z) × kiʻekiʻe (Y) (mm) | 约 5300*6000*3400 |
| Ke kaumaha nui (t) me ka pale | (ma kahi o)20 | |