BOSM -12010 Kūʻē-Poʻo ʻO ka Mīkini Milling
1. Hoʻohana i kamīkini :
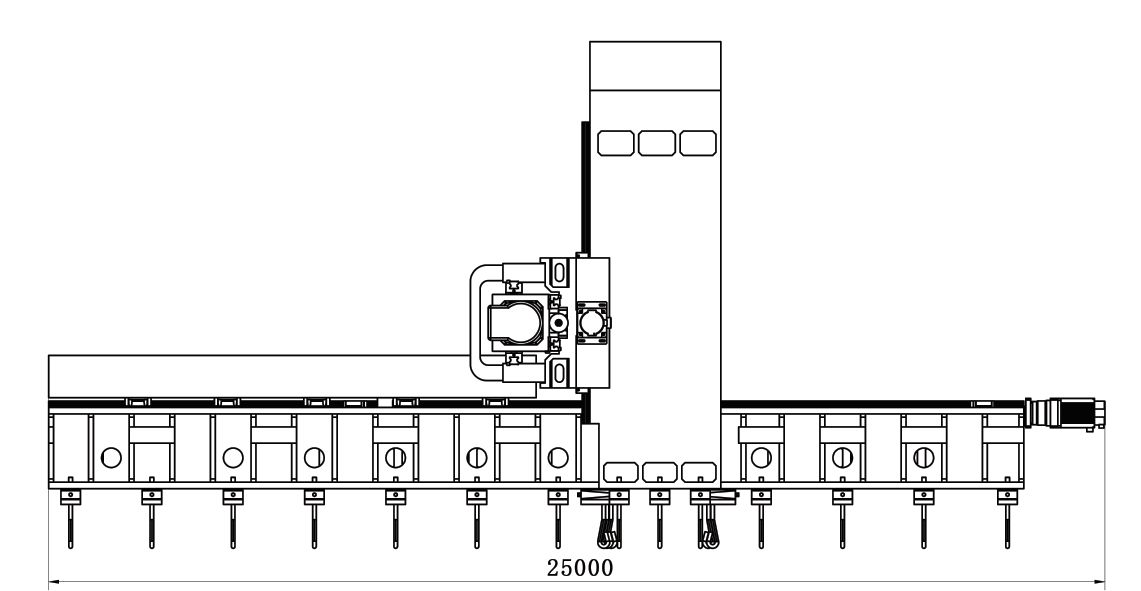
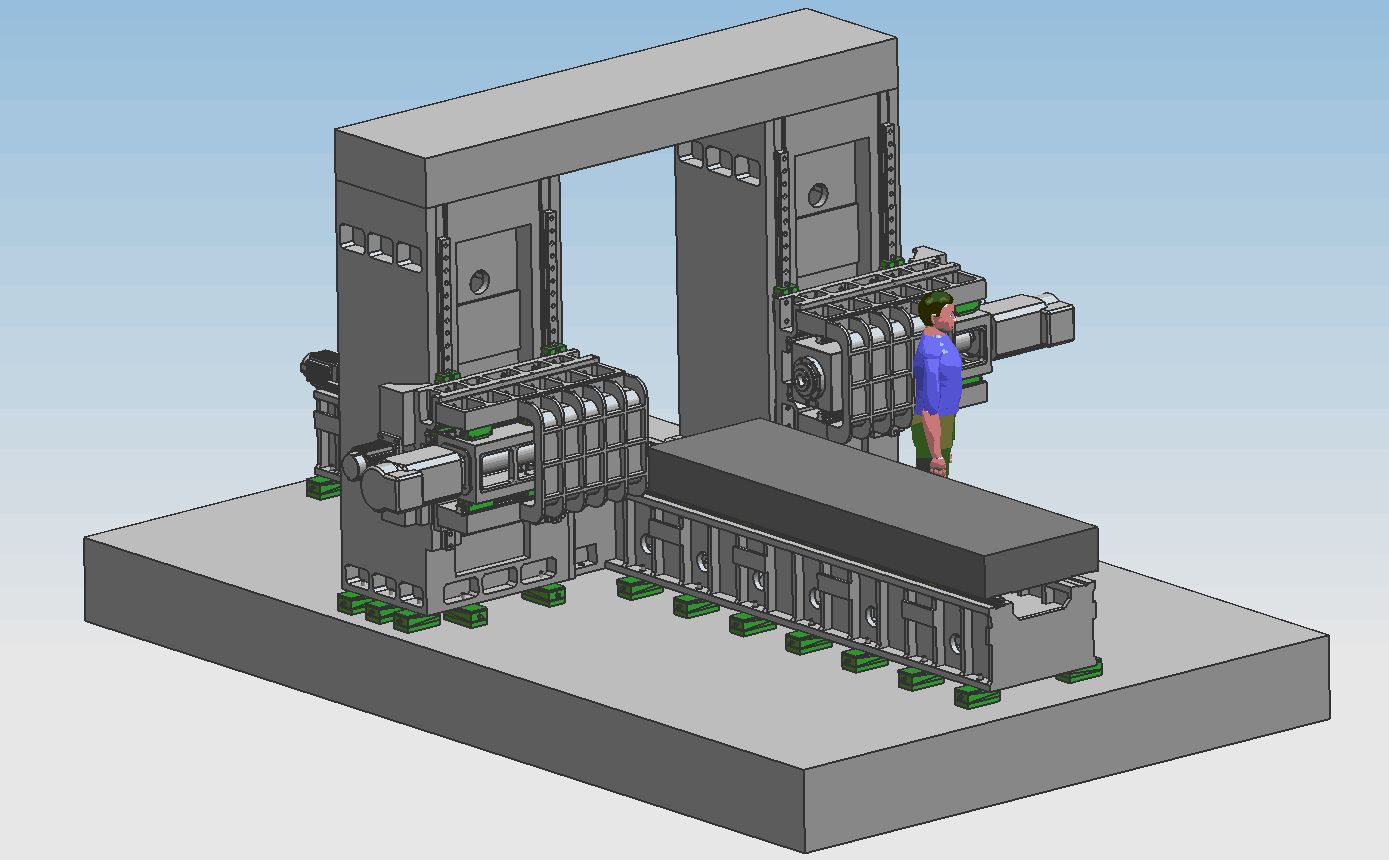
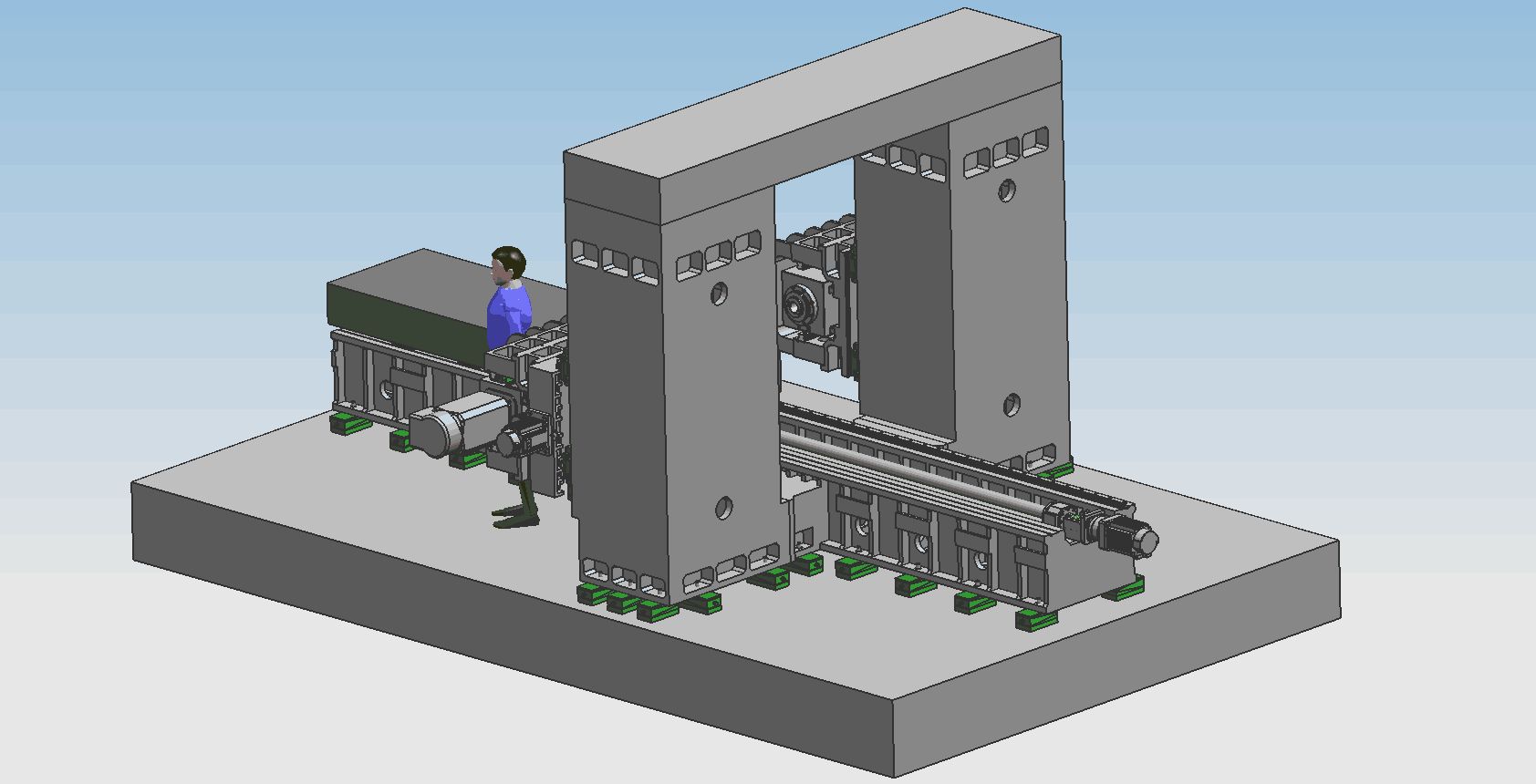
ʻO BOSM- 12000 * 1000 paʻa-beam CNC gantry ʻelua kolamu poʻo-a-poʻo boring a me ka mīkini wili he mea mīkini kūikawā no ka hana ʻana i nā lima / lāʻau excavator.Pillow, hiki ke hoʻomaopopo i ka wikiwiki o ka hana ʻana o ka mea hana, hiki ke wili ʻia ka mea hana, wili ʻia, a hoʻoluhi ʻia i loko o ka pae paʻi maikaʻi, hiki ke hana ʻia ka mea hana ma kahi manawa (ʻaʻohe pono no ka clamping lua), ka wikiwiki o ka hoʻouka ʻana a me ka wehe ʻana. wikiwiki, wikiwiki ke kūlana hoʻonohonoho, a kiʻekiʻe ka pololei o ka hana.Kiʻekiʻe, kiʻekiʻe ka hana pono.
2.ʻAno mīkinihiʻona:
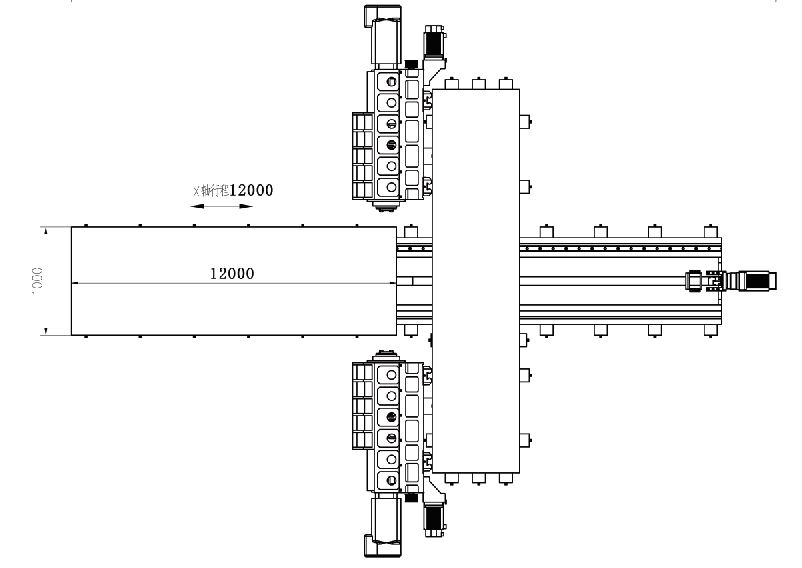
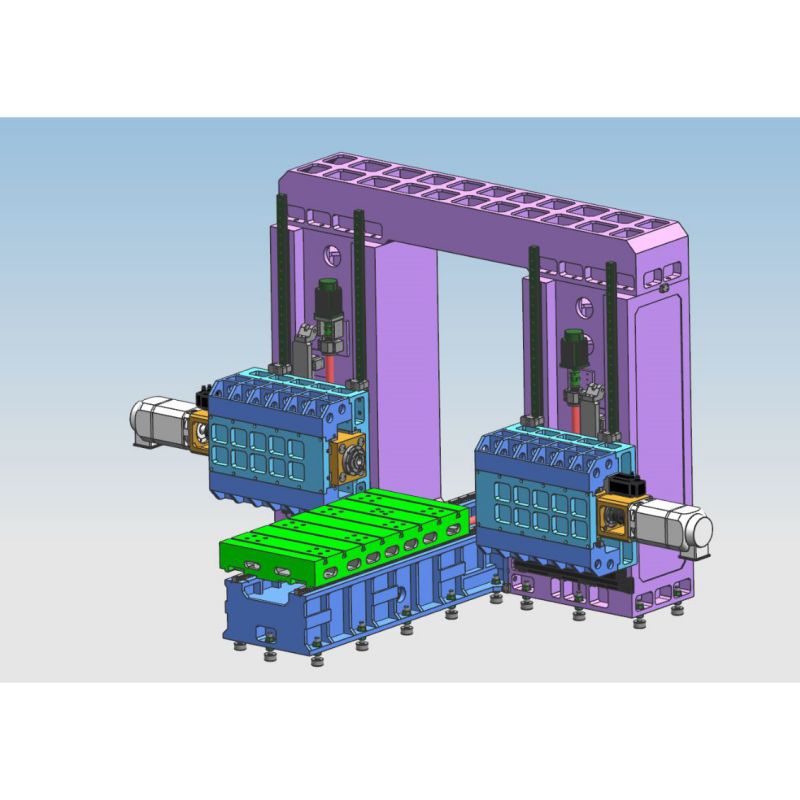
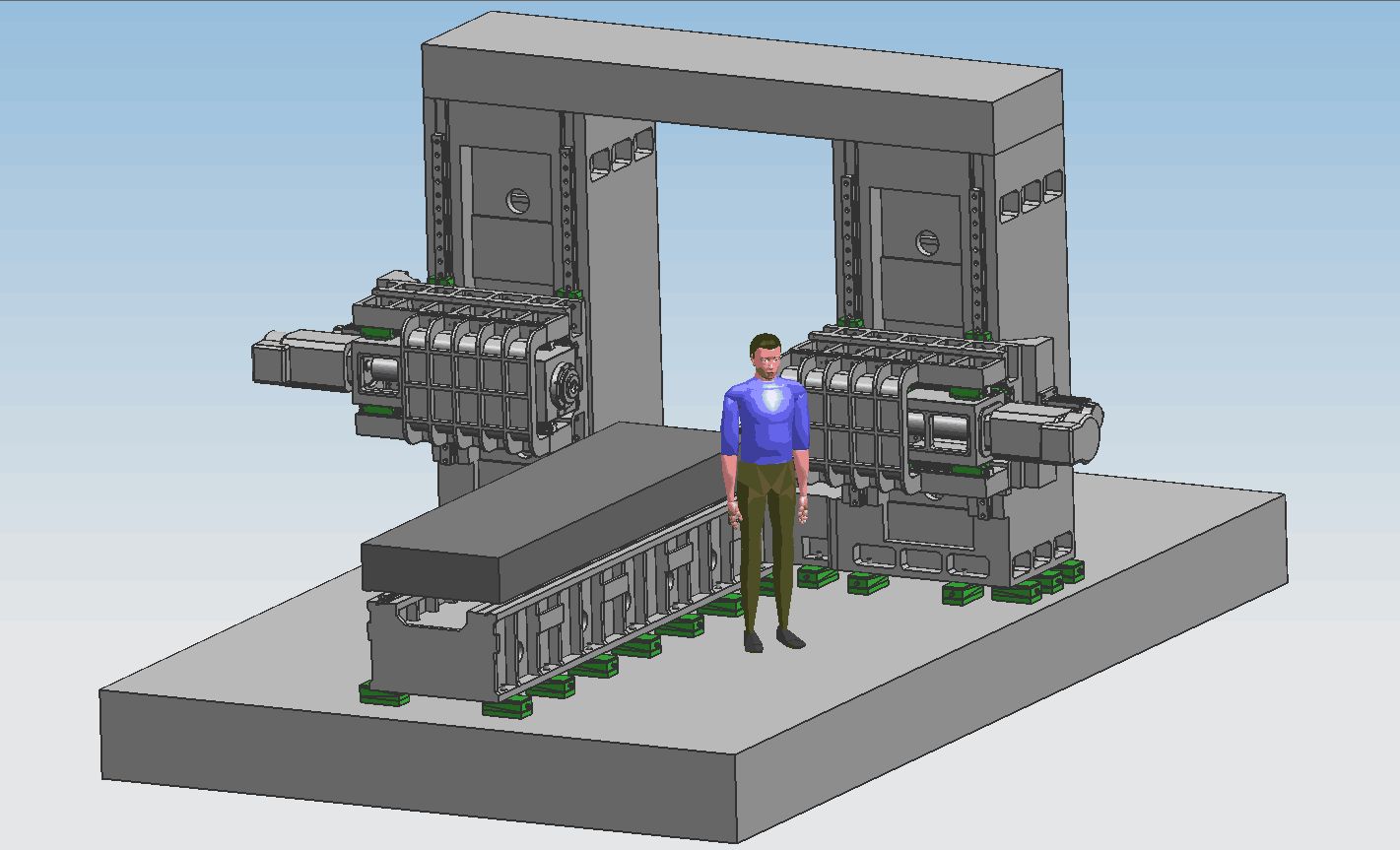
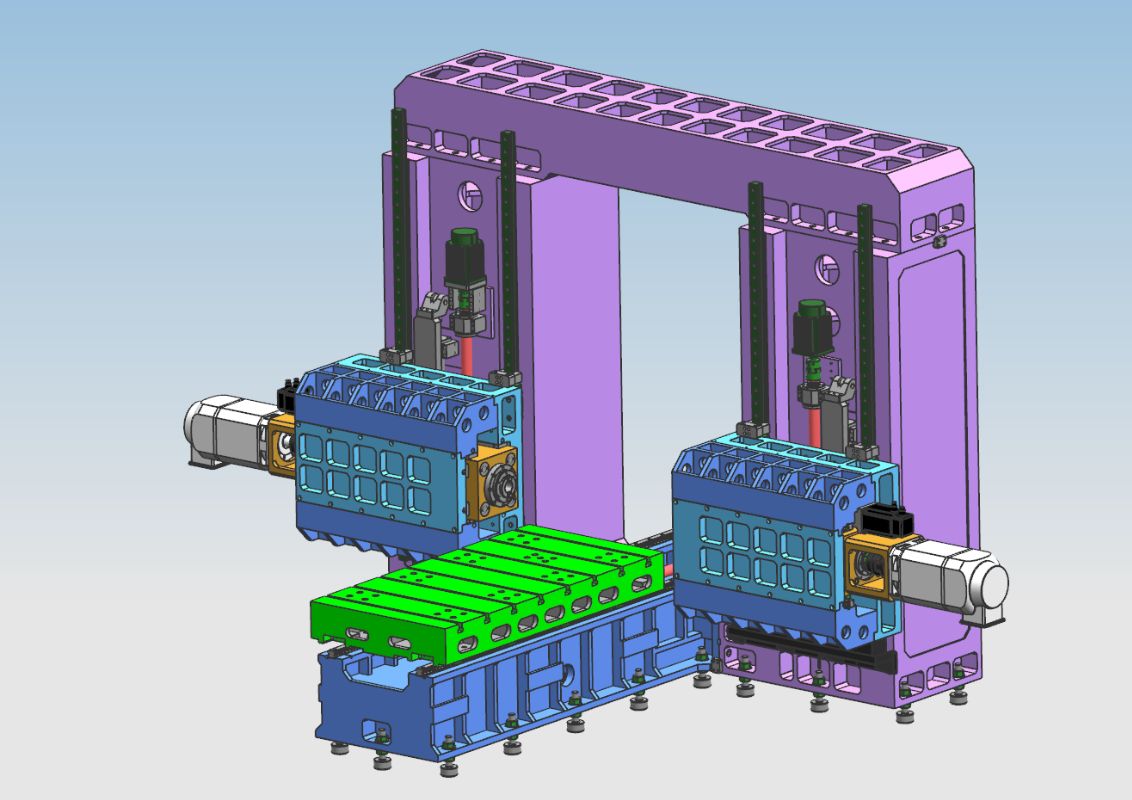
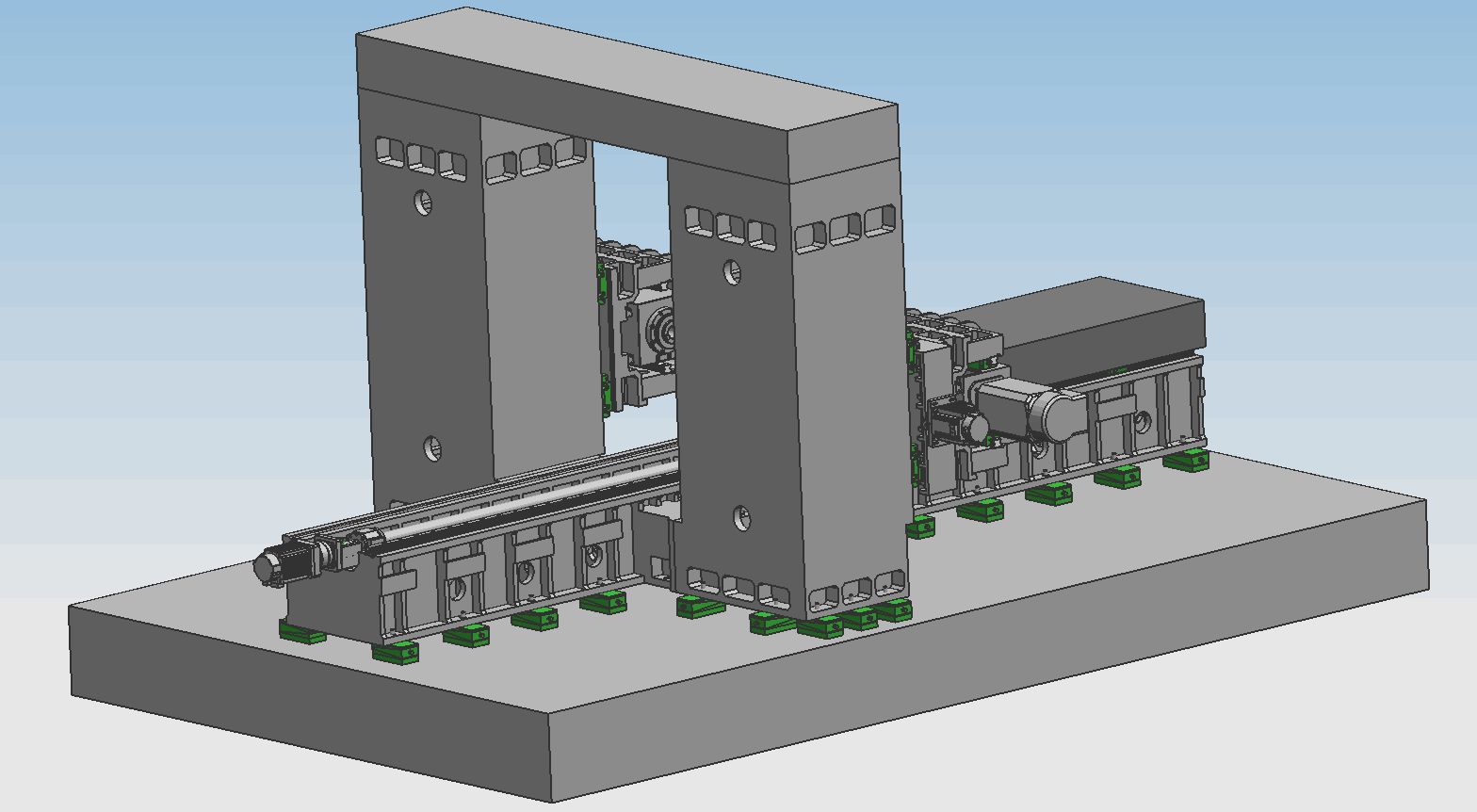
ʻO nā mea nui o ka mīkini mīkini: moe, papa hana, nā kolamu hema a me nā ʻākau, nā kaola, nā kaola hoʻohui gantry, nā noho, nā hipa kāne, a me nā mea ʻē aʻe, nā ʻāpana nui i hana ʻia me ka resin one molding, kiʻekiʻe kiʻekiʻe hina hao 250 hoʻolei, annealed i ka wela. lua one → ʻelemakule haʻalulu → hoʻomaʻamaʻa wela ʻO ka hoʻoheheʻe ʻana i ka umu → ka ʻelemakule haʻalulu → ka mīkini ʻeleʻele → ka ʻelemakule haʻalulu → ka hoʻopili ʻana i ka umu wela → ka ʻelemakule haʻalulu → hoʻopau, hoʻopau loa i ke koʻikoʻi maikaʻi ʻole o nā ʻāpana, a mālama i ka hana o nā ʻāpana.O ka moe paa, na kolamu hema a me na kolamu akau, o ke kaulahao, a me ka papa hana;Loaʻa iā ia nā hana o ka milling, boring, drilling, countersinking, tapping, etc.Loaʻa i ka mīkini mea hana 5 mau koʻi hānai, hiki ke hoʻomaopopo i ka loulou 4-axis a me 5-axis hoʻokahi-hana.Aia he 2 poʻo mana.Hōʻike ʻia ke koʻi o ka mīkini mīkini a me ke poʻo mana ma ke kiʻi ma lalo nei.
2.1.ʻO ke ʻano nui o ka ʻāpana hānai axial transmission
2.1.1.X-axis:Hoʻopili ka papa hana ma hope ma ke ala alakaʻi o ka moena paʻa.
X 1- axis drive: AC servo motor a me kiʻekiʻe-pololei planetary reducer ua alakaʻi ʻia e ka pōlele pōlele e hoʻokele i ka neʻe o ka papa hana e ʻike i ka neʻe laina o ka X-axis
ʻO ke ala kaʻaahi alakaʻi: e waiho i ʻelua mau kaʻa alakaʻi laina laina ikaika kiʻekiʻe.
2.1.2 Z1 axis:Hoʻokomo ʻia ke poʻo mana a me kahi noho ma ka ʻaoʻao mua o ke kolamu, a hoʻopaʻa i luna a i lalo ma ke ala alakaʻi kolamu.
Z1-axis transmission: AC servo motor a me ka huila synchronous i hoʻohana ʻia no ka hoʻokele ʻana i ka pōlele e hoʻokele i ka noho no ka ʻike ʻana i ka neʻe laina laina Z-axis.
2.1.3 Z2 axis:Hoʻokomo ʻia ke poʻo mana a me kahi noho ma ka ʻaoʻao mua o ke kolamu, a hoʻopaʻa i luna a i lalo ma ke ala alakaʻi kolamu.
Z2-axis transmission: AC servo motor a me ka huila synchronous i hoʻohana ʻia no ka hoʻokele ʻana i ka wili pōlele e hoʻokele i ka noho no ka ʻike ʻana i ka neʻe laina laina Z-axis.
2.1.4 Y1 axis:Hoʻokomo ʻia ka noho poʻo mana ma ka ʻaoʻao mua o ke kolamu ʻākau, a hoʻopaʻa i ka hema a me ka ʻākau ma ke ala alakaʻi kolamu.
Y1-axis transmission: AC servo motor a me kiʻekiʻe-pololei planetary reducer hoʻohana ʻia e hoʻokele i ka hipa kāne e neʻe i loko o ka wili pōlele e ʻike ai i ka neʻe laina o ka Y1-axis
2.1.5 Y2 axis:Hoʻokomo ʻia ka noho poʻo mana ma ka ʻaoʻao mua o ke kolamu ʻākau, a hoʻopaʻa i ka hema a me ka ʻākau ma ke ala alakaʻi kolamu.
Y2-axis transmission: AC servo motor a me kiʻekiʻe-pololei planetary reducer ua hoʻohana ʻia no ka hoʻokele ʻana i ka hipa kāne e neʻe i loko o ka wili pōpō e ʻike ai i ka neʻe laina laina Y2-axis.
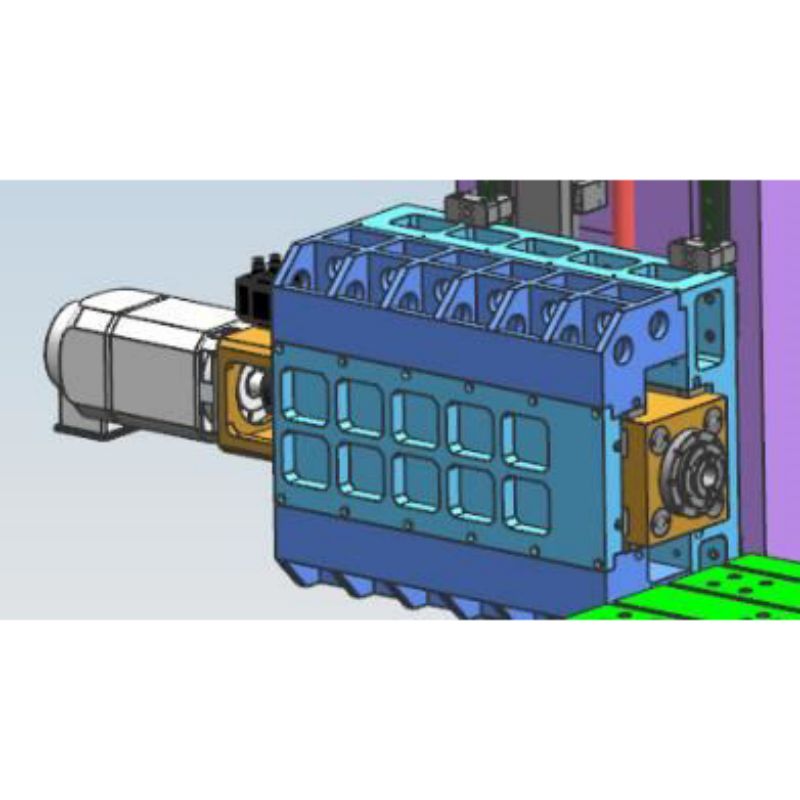
2.2.ʻO ka neʻe ʻana o ke poʻo wili a me ka wili ʻana (me ke poʻo mana 1 a me 2) e hoʻohana i kahi hoʻolālā hipa kāne, ʻo ke ala ʻoi loa o ka uea-paʻakikī i hui pū ʻia, hoʻopuni ʻia ke kaʻa paʻa e ke kākoʻo ikaika, 4 linear roller guide rail alakaʻi ʻia nā pālua, a hoʻohana ke kaʻa i ka kaʻa servo AC E hoʻokele i ke kāʻei synchronous (i=2) a me ka hoʻouna ʻana i ka pōleʻa pōleʻa pololei, lawe ke poʻo mana i ka mīkini servo e hoʻolōʻihi i ke kāʻei synchronous a me ka huila synchronous, alakaʻi ʻia e ka pololei hana kaumaha. alakaʻi kaʻaahi lua, a hoʻokuke i ka wili poepoe kuʻekuʻe e rotate, ike i ke poʻo mana E hana i luna a me lalo vertical neʻe , a lako me ka naikokene koena pae e hoemi i ka hiki o ka mīkini poo ma ka wili a me ka servo kaʻa.Loaʻa i ka motika Z-axis kahi hana kaʻa kaʻa.I ka pilikia o ka mana, e hoʻopaʻa paʻa ka pahu kaʻa i ka pahu kaʻa., i hiki ole ke hoohuli.I ka hana ʻana, inā ʻaʻole pili ka drill bit i ka mea hana, e hānai wikiwiki ia;ke hoʻopā ka drill bit i ka mea hana, e hoʻololi koke ia i ka hana hana.Ke komo ka drill bit i ka mea hana, e hoʻololi koke ia i ka hoʻihoʻi wikiwiki;i ka wā e haʻalele ai ka hopena o ka drill bit i ka mea hana a hiki i ke kūlana i hoʻonohonoho ʻia, e neʻe ka papa hana i kahi kūlana puka aʻe e ʻike ai i ka holo ʻokoʻa.Hoʻohana ke poʻo mana i ka hui pū ʻana o ka uea a me ke kaʻa paʻa, ʻaʻole ia e hōʻoia i ka holo wikiwiki ʻana o nā mea hana, akā hoʻonui nui i ka rigidity o nā mea hana.A hiki iā ia ke hoʻomaopopo i nā hana o ka hoʻoheheʻe ʻana i nā puka makapō, ka milling, chamfering, chip breaking, auto chip removal, etc., e hoʻomaikaʻi ai i ka hana hana.
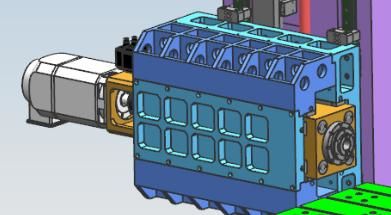
(hema poʻo mana)
2.3.Ka wehe ʻana a me ka hoʻoluʻu
Aia nā mea hoʻoheheʻe spiral a me nā kaulahao palahalaha i hoʻokomo ʻia ma nā ʻaoʻao ʻelua ma lalo o ka papa hana, a hiki ke hoʻokuʻu ʻia nā chip i ka conveyor chip ma ka hopena ma o ʻelua mau pae o ka spiral a me nā papa kaulahao e ʻike ai i ka hana civili.Aia kahi paila hoʻoheheʻe i loko o ka pahu hoʻoheheʻe o ka mea lawe chip, hiki ke hoʻohana ʻia no ka hoʻoluʻu waho o ka mea hana e hōʻoia i ka hana wili a me ke ola lawelawe o ka drill bit, a hiki ke hana hou ʻia ka mea hoʻoheheʻe.
3.Pūnaehana mana helu kikohoʻe piha:
3.1.Me ka hana wāwahi chip, hiki ke hoʻonohonoho ʻia ka manawa wāwahi chip a me ka pōʻai wāwahi chip ma ka interface man-machine.
3.2.Me ka hana hoʻokiʻekiʻe hāmeʻa, hiki ke hoʻonohonoho ʻia ke kiʻekiʻe o ke kiʻekiʻe kiʻekiʻe ma ke kikowaena kanaka-mīkini.Ke hiki i ka wili ʻana i kēia kiʻekiʻe, e hoʻokiʻekiʻe koke ʻia ka drill bit i luna o ka mea hana, a laila hoʻolei ʻia nā ʻāpana, a laila hoʻomaka wikiwiki i ka ʻili wili a hoʻololi ʻokoʻa i ka hana.
3.3.Hoʻohana ʻia ka pahu hoʻokele kikowaena kikowaena a me ka ʻāpana paʻa lima i ka ʻōnaehana helu helu a ua hoʻolako ʻia me ka USB interface a me ka LCD liquid crystal display.I mea e maʻalahi ai ka hoʻonohonoho ʻana, mālama, hōʻike a me ke kamaʻilio ʻana, loaʻa nā hana e like me ke kamaʻilio kanaka-machine, ka uku hewa, a me ke ala ala.
3.4.Loaʻa i nā mea hana ke nānā a nānā hou i ke kūlana o ka lua ma mua o ka hana ʻana, a maʻalahi ka hana.
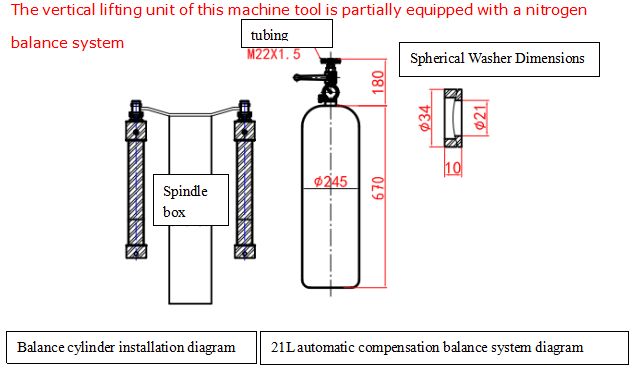
4.Lubrication 'akomi
ʻO nā paʻa kaʻa alakaʻi laina laina pololei o ka mīkini mīkini, nā hui wili pōlele pololei a me nā hui hoʻoneʻe kiʻekiʻe ʻē aʻe i lako me nā ʻōnaehana lubrication aunoa.Hoʻopuka ka ʻaila lubricating ʻakomi i ka ʻaila kaomi, a komo ke keʻena aila lubricator quantitative i ka ʻaila.Ma hope o ka hoʻopihaʻiaʻana o ke keʻenaʻaila i kaʻaila, i ka piʻiʻana o ke kaomi o ka pūnaewele i ka 1.4-1.75Mpa, ua paniʻia ka hoʻololi kaomi i loko o ka pūnaewele, ua pau ka paila, a hoʻokuʻuʻia ka valve wehe i ka manawa like.Ke hāʻule ke kaomi aila ma ke alanui ma lalo o 0.2Mpa, hoʻomaka ka lubricator quantitative e hoʻopiha i ka wahi lubricating a hoʻopiha i hoʻokahi hoʻopiha aila.Ma muli o ka hāʻawi pololei ʻana o ka aila injector quantitative a me ka ʻike ʻana i ke kaomi ʻōnaehana, hilinaʻi ka lako aila, e hōʻoia ana aia kahi kiʻi ʻaila ma ka ʻili o kēlā me kēia hui kinematic, e hōʻemi ana i ka friction a me ka ʻaʻahu, a me ka pale ʻana i ka pōʻino. ka hale o loko i hana ʻia e ka wela nui., e hōʻoia i ka pololei a me ke ola o ka mīkini mīkini.Ke hoʻohālikelike ʻia me ke kaʻa alakaʻi sliding, ʻo ka rolling linear guide rail pair i hoʻohana ʻia i loko o kēia mīkini mīkini he mau mea maikaʻi:
①He kiʻekiʻe ka motion sensitivity, he liʻiliʻi ka friction coefficient o ke kaʻa alakaʻi ʻōwili, 0.0025 ~ 0.01 wale nō, a ua hoʻemi nui ʻia ka mana hoʻokele, ʻo ia wale nō ka like me 1/10 o nā mīkini maʻamau.
② He liʻiliʻi loa ka ʻokoʻa ma waena o ka dynamic friction a me ka static friction, a ʻoi aku ka maikaʻi o ka hana hahai, ʻo ia hoʻi, pōkole loa ka manawa ma waena o ka hōʻailona hoʻokele a me ka hana mechanical, kahi kūpono e hoʻomaikaʻi ai i ka wikiwiki o ka pane a me ka naʻau. ka ʻōnaehana mana helu.
③ He kūpono ia no ka neʻe laina laina kiʻekiʻe, a ʻo kona wikiwiki koke ma kahi o 10 mau manawa kiʻekiʻe ma mua o nā ala alakaʻi sliding.
④ Hiki iā ia ke hoʻomaopopo i ka neʻe ʻana o ka gapless a hoʻomaikaʻi i ka neʻe ʻana o ka rigidity o ka ʻōnaehana mechanical.
⑤I hana ʻia e nā mea hana ʻoihana, he kiʻekiʻe kiʻekiʻe, versatility maikaʻi a me ka mālama maʻalahi.
5.Kaiapuni hoʻohana mīkini:
Hāʻawi mana: ʻekolu ʻāpana AC380V ± 10% , 50Hz ± 1 ʻO ka wela ambient: 0 ° ~ 45 °
ʻElima, nā palena ʻenehana nui:
6.Nā palena ʻenehana
| Hoʻohālike | BOSM12010 | |
| Ka nui o ka mea hana hana | Ka lōʻihi × laula × kiʻekiʻe (mm) | 12000×1000×1500 |
| Ke Anawaena Oki Kiekie | 200mm | |
| ʻO ka hānai nui loa o Gantry | Laulā (mm) | 1300 |
| nui pākaukau hana | Ka lōʻihi X ka laula (mm) | 12000*1000 |
|
Poʻo wili hipa ʻano ʻano hipa poʻo mana hoʻokahi ʻelua
| Nui (2) | 2 |
| Spindle lipi | BT50 | |
| Anawaena wili (mm) | Φ2-Φ60 | |
| Anawaena paʻi (mm) | M3-M30 | |
| ʻO ka māmā milo (r/min) | 30~6000 | |
| ʻO ka mana kaʻa kaʻa spindle Servo (kw) | 37 | |
| ʻO ka mamao o ka ihu spindle mai ke kikowaena papaʻaina (mm) | 150-650 | |
| ʻO ka hahau hema a ʻākau o ka hipa kāne hoʻokahi (mm) | 500 | |
| Ka mamao ma waena o ke kikowaena o ka hipa kāne a me ka mokulele o ka pākaukau (mm) | 200-1700 | |
| ʻO ka hana i luna a i lalo o ka hipa kāne (mm) | 1500 | |
| Hiki hou | 300mm*300mm | ±0.02 |
| Nā Ana Mea Hana Mīkini | Ka lōʻihi × laula × kiʻekiʻe (mm) | e like me na kii |
| Kaumaha nui (t) | (koi.) 62 | |
ʻO nā palena ma luna nei he mau palena hoʻolālā mua.I ka hoʻolālā maoli, hiki ke hoʻololi e like me nā koi o ka hana ʻana o ka mea hana a me nā koi hoʻolālā o ka mīkini mīkini, i mea e hoʻokō ai i nā koi o nā ʻāpana hana o kāu hui.